Release History of OpenCDA
This page demonstrates all the changes since the origin release v0.1.0 with more detailed imags.
v0.1.2
Map manager
OpenCDA now adds a new component map_manager for each cav. It will dynamically load road topology, traffic light information, and dynamic
objects information around the ego vehicle and save them into rasterized map, which can be useful for RL planning, HDMap learning, scene understanding, etc.
Key elements in the rasterization map:
Drivable space colored by black
Lanes
Red lane: the lanes that are controlled by red traffic light
Green lane: the lanes that are controlled by green traffic light
Yellow lane: the lanes that are not effected by any traffic light
Objects that are colored by white and represented as rectangle

v0.1.1
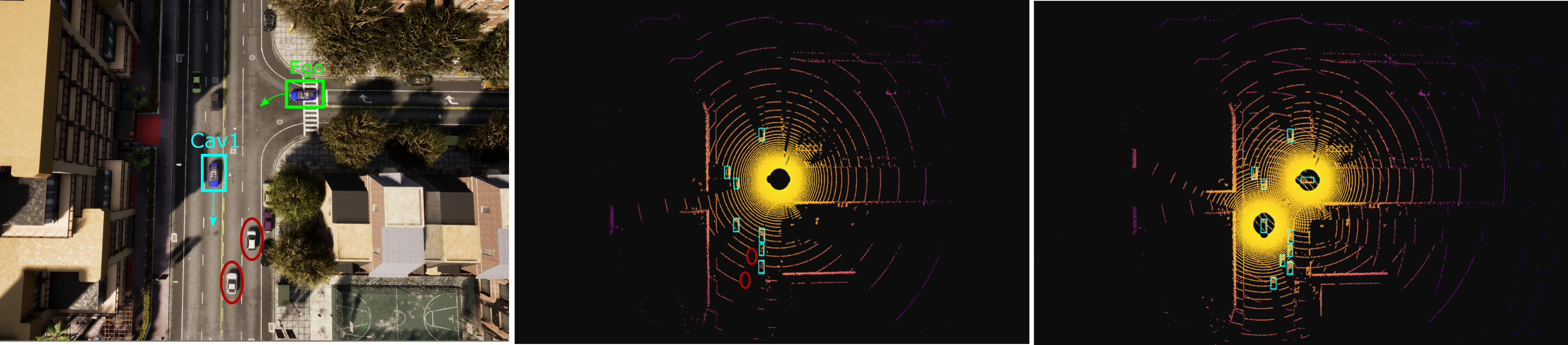
Cooperative Perception
OpenCDA now supports data dumping simultaneously for multiple CAVs to develop V2V perception algorithms offline. The dumped data includes:
LiDAR data
RGB camera (4 for each CAV)
GPS/IMU
Velocity and future planned trajectory of the CAV
Surrounding vehicles’ bounding box position, velocity
Besides the above dumped data, users can also generate the future trajectory for each
vehicle for trajectory prediction purpose. Run python root_of_opencda/scripts/generate_prediction_yaml.py
to generate the prediction offline.
This new functionality has been proved helpful. The newest ICRA 2022 paper OPV2V: An Open Benchmark Dataset and Fusion Pipeline for Perception with Vehicle-to-Vehicle Communication has utilized this new feature to collect cooperative data. Check https://mobility-lab.seas.ucla.edu/opv2v/ for more information
CARLA 0.9.12 Support
OpenCDA now supports both CARLA 0.9.12 and 0.9.11. Users needs to set CARLA_VERSION variable before installing OpenCDA. When users run opencda.py, -v argument is required to classify the CARLA version for OpenCDA to select the correct API.
Weather Parameters
To help estimate the influence of weather on cooperative driving automation, users now can define weather setting in the yaml file to control sunlight, fog, rain, wetness and other conditions.
Bug Fixes
Some minor bugs in the planning module are fixed.